ROSCon Macau 2019

ROSCon 2019 Group Photo







ROSCon 2019 Macau is a wrap! This year was the largest ROSCon yet with just shy of 600 attendees from 42 countries coming together to share their advances and developments from the previous year. This year’s ROSCon was also the longest as we piloted a half day of workshops, with additional user organized workshops after the conference as well. If you missed the live stream both videos and talk slides will be posted within the next two weeks for the benefit of the community. While ROSCon was huge this year, with multiple tracks and topics of discussion, a few key themes emerged that we wanted to highlight in advance of the regular conference materials.
ROS 2 support and adoption is growing quickly, with over half the talks devoted to ROS 2. Many of the talks focused on best practices of moving from ROS 1 to ROS 2 and the advantages that come with that transition. Of particular interest this year was the evolution of ROS 1 Navigation Stack into the ROS 2 Navigation Stack with an extremely informative talk by Matthew Hansen at Intel. Other talks of note include discussions of new ROS 2 QoS policies, multiple performance enhancements to ROS middleware implementations, and new features in Ignition Gazebo to support more realistic simulation and better testing.
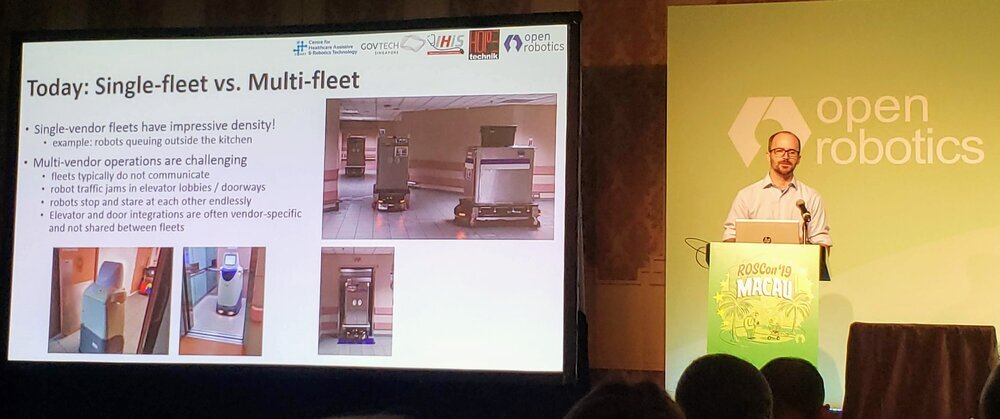
Another broad topic this year was the maturation of ROS tools for robot fleet management. As the start-up ecosystem surrounding ROS has grown, so has the number of deployed ROS robots. This year both ROSCon keynotes focused on software tools to assist in multi-robot deployments, and the integration of these robots with other customer assets. Of particular interest was the first day’s keynote by Selina Seah, CEO of Changi General Hospital and Morgan Quigley from Open Robotics. Changi General Hospital is one of the most advanced hospitals in the world with respect to assistive robotics, but they have a problem; it is difficult to coordinate multiple robotic fleets that share physical building assets with people. For example, how do multiple fleets of robots and humans co-exist effectively in busy hospital hallways and elevators? In this keynote Morgan and Selina gave examples of new ROS tools like Traffic Editor for managing robot right-of-way in shared environments.
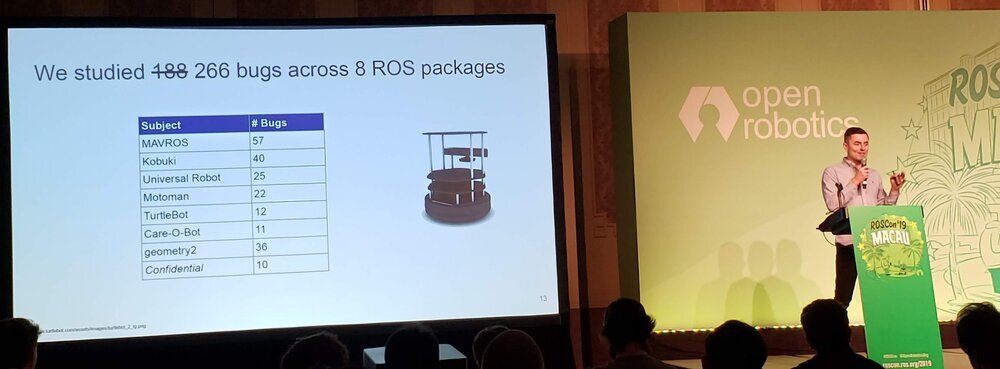
As our community grows and matures another broad topic of interest this year was around community building and enhancing code quality. Christopher Timperley and Andrzej Wasowski had a phenomenal talk where they systematically collected, analyzed, and categorized bugs in ROS packages and then suggested best-practices to mitigate them. Similarly, Sophia Kolak analyzed every ROS Kinetic package on Github in terms of its popularity and dependencies to draw some strong conclusions about how to better support the ROS community. Finally, Bill Smart gave a wonderful half day workshop wherein he summarized some of his current NSF funded research on the ROS community and worked with community members to identify community issues and how to address them. Bill’s work should be published in the near future and we look forward to sharing the results.
In addition to the talks and main conference tracks this year’s ROSCon had a few new features and also created space for the community to meet in person. ROSCon had four official workshops and one un-official workshop this year in addition to two featured panel discussions. This was the fourth year of the diversity scholarships, with 34 diversity scholarships granted to attendees from 14 countries. This year also brought a new tradition: community puzzles! If you attended please complete your the feedback form to tell us what you thought about these events.
ROSCon 2019 was a tremendous success due to the hard work of the global ROS community and in particular our student volunteers, speakers, and program committee. We would like to thank all of you for your hard work that made ROSCon a success. Additionally, we would like to thank our sponsors whose generous support makes ROSCon both possible and accessible. Finally, we would like to thank the city of Macau for being such gracious hosts and providing such a wonderful venue.