
ROS 2 in Science Robotics
New ROS 2 Science Robotics paper features five case studies of ROS 2 users from industry.


SubT Part 5: Results and the Future
This is the final post in our SubT series, in which we’ll cover the results and where SubT is going now that the competition is over.
SubT Part 4: Cloudsim
Welcome to the fourth article in our five part SubT series. Today we will be covering Cloudsim, the open source application developed at Open Robotics to run Ignition on cloud infrastructure.
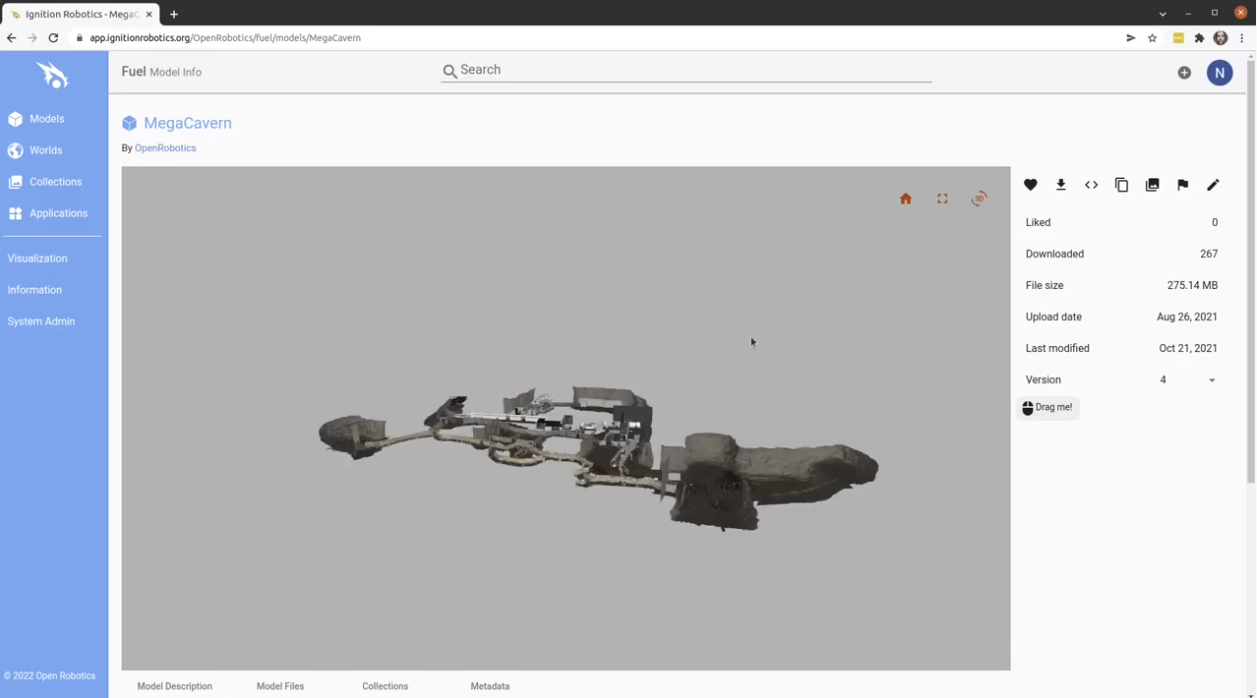
SubT Part 3: Ignition
This is the third article in our five part SubT series. In this article I’ll talk about Ignition, which provided the simulation capabilities for SubT.

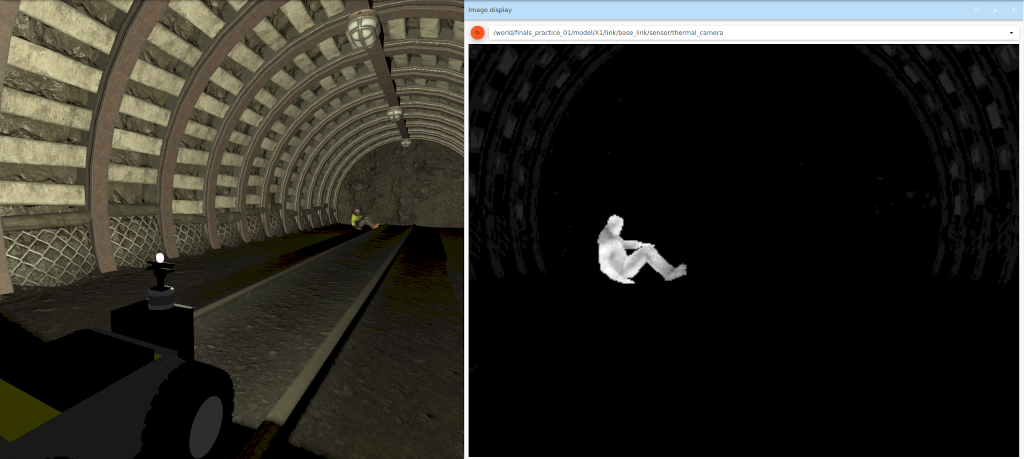
SubT Part 2: Robots and Environments
Welcome to the second article in our SubT series. In this post we’ll go over the different robots and environments developed for SubT.

SubT Part 1: Introduction
This is the first in a series of five blog posts about SubT from the perspective of Open Robotics. We’ll cover basics about the challenge, offer insights about how we established the competition infrastructure, describe new features developed for SubT, and add commentary to the final results.

ROS…in…space!
If you joined us for ROS World 2021 back in October, then you saw the excellent keynote presentation from Kim Hambuchen at NASA Johnson Space Center, in which she talked about many of the ways that NASA has benefitted from ROS. Inspired by Dr. Hambuchen's presentation, let's take a quick tour of ROS-based space applications.

Keeping the lights on
You know Open Robotics as a hub of the global robotics industry through our open software and hardware platforms for robotics. But many wonder how we operate and grow as a business. We do these things by offering a wide array of research, development, and consulting services to industry and government customers around the world. We design our customer engagements so that we can share key results in open source solutions for the benefit of the global robotics community.

ROS.org Refresh and New Video
After a decade we finally updated ros.org and made a new ROS explainer video.

A Common Language for Robot Interoperability
For over three years, we have been collaborating on the Open Robotics Middleware Framework (Open-RMF); a free, open source, modular software system that coordinates multiple fleets of indoor and outdoor robots and integrates them with elevators/lifts, doors and other infrastructure.
Ignition Fortress Released
The simulation team at Open Robotics is happy to announce another major release of Ignition, codenamed Edifice! This is the fifth major release of Ignition, following Dome, Citadel, Blueprint and Acropolis.


Announcing the Sense, Think, Act Podcast
Announcing a new robotics podcast by Open Robotics

